[TOC]
Automated Machine Learning
Key words: automatic machine learning, neural architecture search, hyper-parameter optimization, meta-learning, transfer-learning
1. Introduction
Every aspect of machine learning applications, such as feature engineering, model selection, algorithm selection needs to be carefully configured, which is usually involved heavily with human experts.
AutoML attempts to reduce human assistance in the design, selection and implementation of various machine learning tools used in applications’ pipeline.
Examples:
- Auto-sklearn, try a collection of classifiers on a new problem, then get final predictions from an ensemble of them
- Neural architecture search NAS. Success of AlexNet, VGGNet, GoogleNet, ResNet and DenseNet. Can the neural architecture be automatically designed so that good learning performance can be obtained on the given tasks. Reinforcement Learning has been a powerful and promising tool for NAS.
- Automatic feature engineering, aims to construct a new features set, with which the performance of subsequent machine learning tools can be improved. Existing works on this topic include Data Science Machine(DSM), ExploreKit and FeatureHub
Contributions
- Define the AutoML problem
- Propose a general framework for existing AutoML approaches
- Setting up taxonomies of existing works
- Gives insights of the problem existing approaches want to solve
- Categorize the existing AutoML works based on ‘what’ and ‘how’
- Problem setup is from ‘what’ perspective, which justifies which learning tools we want to make automated
- Techniques are from ‘how’, they are methods to solve automl problems
- A detailed analysis of approaches techniques
- Suggest four promising future research directions: computational efficiency, problem settings, solution techniques and applications
2. Overview
AutoML from two perspectives
automation and machine learning
ML
Experience, Task, Performance
AutoML emphasizes on how easy learning tools can be used
Automation
construct high-level controlling approaches over underneath learning tools so that proper configurations can be found without human assistance
Definition of AutoML
$$ max_{configurations}$$performance of learning tools
s.t. no human assistance and limited computational budget
AutoML attempts to construct machine learning programs (specified by E, T and P in machine learning definition), without human assistance and within limited computational budgets
Goals of AutoML
Three core goals:
- Better performance: good generalization across various input data and learning tasks
- No assistance from humans: configurations can be automatically done for machine learning tools
- Lower computational budgets: the program can return an output within a limited budget
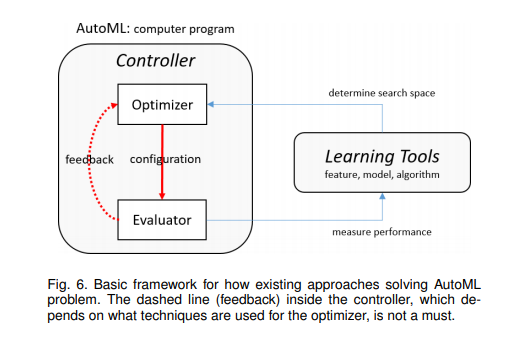
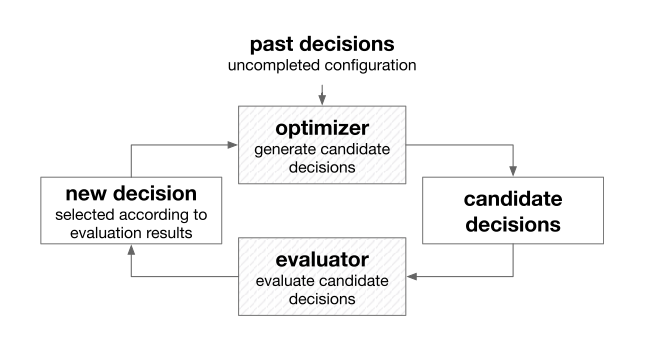
Basic framework
Proposed AutoML framework:
Evaluator: The duty of the evaluator is to measure the performance of the learning tools with configurations provided by the optimizer. After that, it generates the feedback to the optimizer
Optimizer: Update or generate the configuration for learning tools. The search space of the optimizer is defined by learning tools
Taxonomies of AutoML Approaches
Based on what and how to automate
‘What to automate’: by Problem Setup
- general case
- Feature Engineering
- Model selection
- Algorithm selection
- Deep learning
- Neural Architecture Search
- general case
‘How to automate’: by Techniques
Basic
- Optimizer: Optimization & Search
- Simple search approaches: grid search, random search
- Optimization from samples
- Gradient descent
- More complex ones: reinforcement learning and automatic differentiation
- Evaluator: Performance Evaluation
- Basic evaluation strategies
- Optimizer: Optimization & Search
Advanced
Experienced techniques learn and accumulate knowledge from past searches or external data. They usually need to be combined with basic ones
- Meta Learning
- Transfer Learning
They both try to make use of external knowledge to enhance basic ones for the optimizer and evaluator
We focus on supervised AutoML approaches in this survey as all existing works for AutoML are supervised ones
Working flow based on Taxonomies
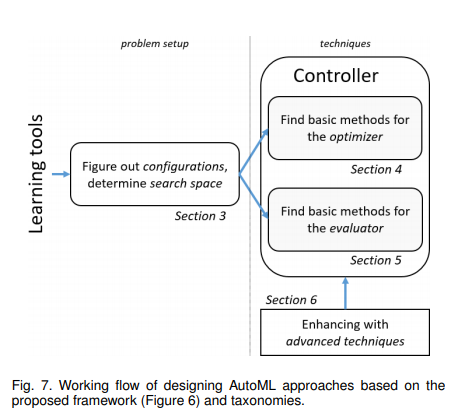
3. Problem settings
- What learning process we want to focus on?
- What learning tools can be designed and used?
- What are resultant corresponding configurations?
By answering the questions we can define the search space for an AutoML approach
3.1 Feature Engineering
Automatically construct features from the data so that subsequent learning tools can have good performance
The above goal can be further divided into two sub-problems:
- creating features from the data
- enhance features’ discriminative ability (For now, we focus on this)
Feature Enhancing Methods
Dimension reduction
select a subset of features from the original ones, popular methods are greed search and lasso
Feature projection transforms original features to a new low-dimensional space, e.g., PCA, LDA, autoencoders
Feature generation
construct new features from the original ones based on some pre-defined operations.
e.g., multiplication of two features and standard normalization
Feature encoding
re-interprets original features based on some dictionaries learned from the data. Training samples that are not discriminable in the original space become separable in the new space.
e.g. sparse coding, local-linear coding, kernel methods(used with SVM)
Search space
hyper-parameters of tools, and configuration exactly refers to these hyper-parameters
e.g., determine the dimension of features when employing PCA, and the level of sparsity if sparse coding is used
contains features to be generated and selected, commonly considered in feature generation. Basically, the search space if spanned by operations on original features, from plus, minus and times operation
3.2 Model selection
- pick up some classifiers
- set their corresponding hyper-parameters
Classification Tools
e.g.,
- tree classifiers
- linear classifiers
- kernel machines
- deep networks
Search space
The candidate classifiers and their corresponding hyper-parameters make up the search space
3.3 Optimization Algorithm Selection
Automatically find an optimization algorithm so that efficiency and performance can be balanced
Optimization algorithms
- Gradient descent(GD), suffers from convergence and expensive per-iteration complexity.
- L-BFGS, Limited memory-BFGS, more expensive but converges faster
- SGD, stochastic gradient descent, each iteration is very cheap but many iterations are need before convergence
Search space
determined by configurations of optimization algorithms, contains the choice of optimization algorithms and the values of their hyper-parameters
3.4 Full scope
Two classes of full-scope AutoML approaches
general case
combination of feature engineering, model selection and algorithm selection
NAS
target at searching good deep network architectures that suit learning problem
Three reasons why discuss it in parallel with the full scope
- hot research topic
- application domain for deep networks is relative clear
- domain specific network architectures can fulfill the learning purpose, where feature engineering and model selection are both done by NAS
Network Architecture Search(NAS)
e.g. CNN
- number of filters
- filter height
- stride height
- filter width
- stride width
- skip connections
4. Basic techniques for optimizer
After the search space is defined, we need to find an optimizer to guide the search in the space
Three important questions:
- What kind of search space can the optimizer operate on?
- What kind of feedbacks it needs?
- How many configurations it needs to generate/update before a good one can be found? – efficiency
Divide techniques into three categories:
- simple search approaches
- optimization from samples
- gradient descent
4.1 Simple search approaches
make no assumptions about the search space
each configuration in the search space can be evaluated independently
Grid search(brute force)
Enumerate every possible configurations in the search space
Discretization is necessary when the search space is continuous
Random search
Randomly samples configurations in the search space
Random search can explore more on important dimensions than grid search
Simple search does not exploit the knowledge gained from the past evaluations, it is usually inefficient.
4.2 Optimization from samples
iteratively generates new configurations based on previously samples
more efficient than simple search methods
does not make specific assumptions about the objective
divide into 3 categories:
- heuristic search
- model-based derivative-free optimization
- reinforcement learning
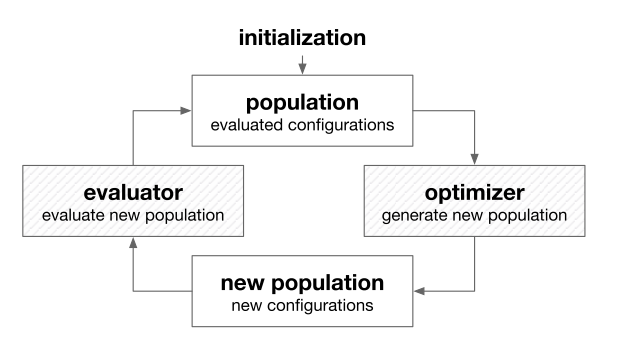
Heuristic search 启发式搜索
often inspired by biologic behaviors and phenomenon
widely used to solve optimization problems that are non-convex, non-smooth, or even non-continuous
population-based optimization methods
popular heuristic search methods:
Popular swarm optimization(PSO) 粒子群优化
inspired by the behavior of biological communities that exhibit both individual and social behavior
the population is updated by moving towards the best individuals
PSO optimizes by searching the neighborhoods of the best samples
PSO has been used for model selection, feature selection for support vector machine (SVM), and hyper-parameter tuning for deep networks
Evolutionary algorithms
inspired by biological evolution
generation step contains crossover and mutation
crossover 交叉
involve two different individuals, combine them in some way to generate an new individual
mutation 变异
slightly changes an individual to generate a new one
With crossover mainly to exploit and mutation mainly to explore, the population is expected to evolve towards better performance.
Has been applied in feature selection and generation and model selection
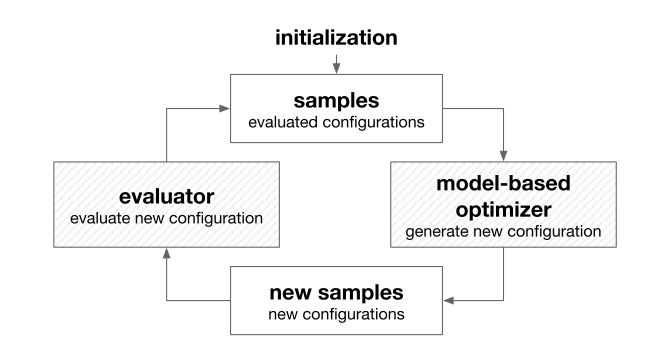
Model-based Derivative-Free Optimization
Model-based optimization builds a model based on visited samples
Full utilization of feedbacks from the evaluator helps it generate more promising new samples
Popular methods:
Bayesian optimization
builds a probabilistic model
define an acquisition function based on the probabilistic model
a new sample is generated by optimizing the acquisition function and used to update the probabilistic model once its evaluated
classification-based optimization(CBO)
classification-based optimization learns a classifier that divides the search space into positive and negative areas.
Then, new samples are randomly generated in the positive area where it is more likely to get better configurations
efficient
Simultaneous optimistic optimization(SOO)
branch-and-bound optimization algorithm
tree structure is built on the search place
SOO deeply explores the search space by expanding leaf nodes
Through the tree model, SOO can balance exploration and exploitation to find the global optimum then the objective function is Local-Lipschitz continuous
suffer from curse of dimensionality
Reinforcement learning
can solve problems with delayed feedbacks
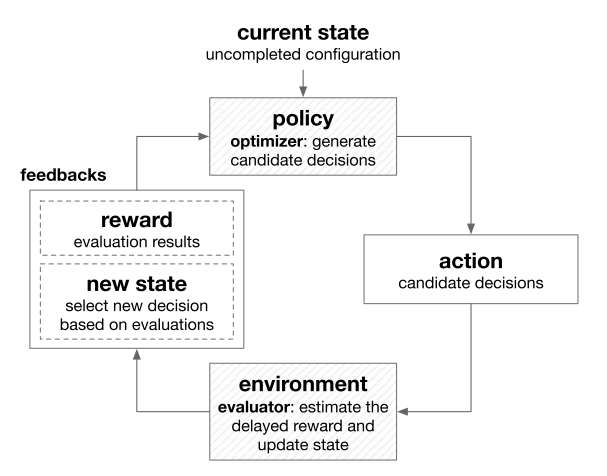
The feedbacks(reward and state) do not need to be immediately returned once an action is taken. They can be returned after performing a sequence of actions
RL is recently used in NAS. Design of one layer can be seen as one action given by the optimizer. Due to the delayed feedbacks, AutoML with reinforcement learning is highly source-consuming.
Some current endeavors addressing this problems are learning transferable architectures from smaller data sets, and cutting the search space by sharing parameter
RL has also been used for optimization algorithms search, automated feature selection and training data selection in active learning
4.3 Gradient descent
Optimization problems of AutoML is very complex, and the objective is usually not differentiable or even not continuous.
In AutoML problem, the gradients need to be numerically computed
This can be done with finite differentiation methods but at high costs
The computation of exact gradients relies on the convergence of model training
Through inexact gradient, hyper-parameters can be updated before the model training converges, which makes gradient descent method more efficient
Another way to compute gradients is through reversible learning (automatic differentiation)
compute gradients with chain rule
backpropagation process of network training
4.4 Greedy search
natural strategy to solve multi-step decision making problem
follows a heuristic that makes locally optimal decision at each step with the intent of finding a global optimum
applied in feature selection and submodular optimization
E.g., in NAS problem, greedy search is applied for multi-attribute learning problems
greedy search is also employed to search block structures within a cell, which is later used to construct a full CNN
4.5 Other techniques
popular one is to change the landscape of the search space so that more powerful optimization techniques can be used
E.g., discrete search space to continuous, then use gd instead of RL. or encoder-decoder framework
5. Basic techniques for evaluator
Very time-consuming as it involves model training for most of the times
Three important questions:
- Can the technique provide fast evaluation?
- Can the technique provide accurate evaluation?
- What feedbacks need to be provided by the evaluator?
Tradeoff between the first and second question
Lower accuracy but larger variance
5.1 Techniques
Direct evaluation
simplest method
the model parameters are learned on the training set, and the performance is measured on the validation set afterwards
accurate but expensive
Sub-sampling
training time depends heavily on the amount of training data
train parameters with a subset of the training data
either using a subset of samples, a subset of features or multi-fidelity(多高保真) evaluations
Early stop
it is usually used to cut down the training time for unpromising configurations
If a poor early-stage performance is observed, the evaluator can terminate the training and report a low performance to indicate that the candidate is unpromising
introduces noise and bias to the estimation, maybe some features eventually turn out to be good after sufficient training
Parameter reusing
use parameters of the trained models in previous evaluation
to warm-start the model training for the current evaluation
parameters learned with similar configurations can be close with each other
as different start point may lead convergence to different local optima, it sometimes brings bias in the evaluation
one of the most straightforward applications of transfer learning
Surrogate evaluator
cut down the evaluation cost is to build a model that predicts the performance of given configurations, with experience of past evaluations
serving as surrogate evaluators, sparse the computationally expensive model training, significantly accelerate AutoML
the application scope is limited to hyper-parameter optimization since other kinds of configurations are often hard to quantize, meta-learning are promising to address this problem
6. Experienced Techniques
experienced techniques that can improve the efficiency and performance of AutoML
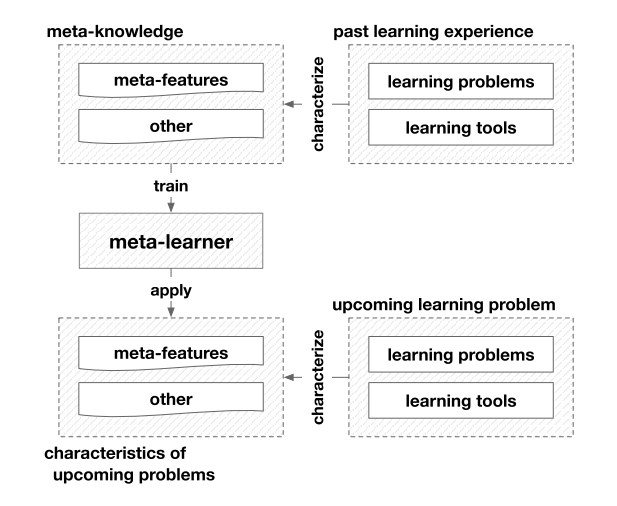
meta-learning
meta-knowledge about learning is extracted
meta-learner is trained to guide learning
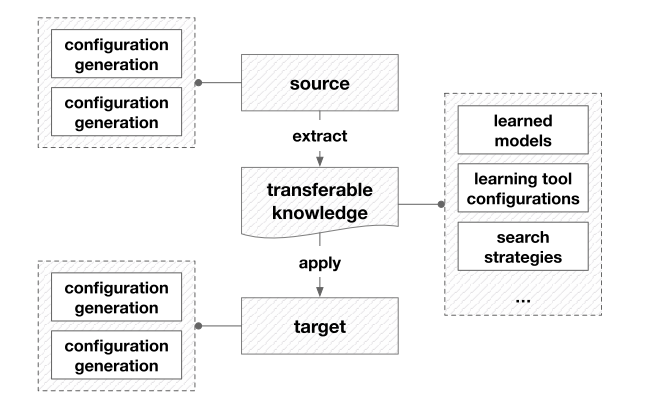
transfer learning
transferable knowledge is brought from past experiences to help upcoming learning
They all aim to exploit experience gained from past learning practices
Some researchers also take transfer learning as a special case of meta-learning
6.1 Meta-learning
Categorizing them into three general classes:
- for the evaluator
- for the optimizer
- for dynamic configuration adaptation
General Meta-Learning Framework
Configuration Evaluation
Most computation-intensive step: configuration evaluation, due to cost of model training and validation
Categorize:
Model evaluation
meta knowledge: meta features of learning problems and the empirical performance of different models
meta learner: map the meta-features to the performance, applicability, ranking of models
General configuration evaluation
E.g., in ExploreKit, ranking classifiers are trained to candidate features
Meta-learners are trained to predict the performance or suitability of configurations
where all possible choices have been enumerated, best configurations can be directly selected according to the scores and rankings predicted by the meta-learner
Configuration Generation
Meta-Learning can also facilitate configuration generation by learning
Promising configuration generation
meta-knowledge indicate the empirically good configurations are extracted
meta-learner, take learning problem as input and predict promising configurations
it is also possible to learn promising configuration generation strategies(e.g., feature transformations)
Warm-starting configuration generation
better initialize configuration search
given a new learning task, to identify the past tasks that are closest to it in the meta- feature space, and use their best-performing configurations to initialize search
Search space refining
make effort to evaluate the importance of configurations, or identify promising regions in the search space
Dynamic Configuration Adaptation
the data distribution varies even in a single data set, especially in data streams
concept drift: such change in data distribution
Classical ml, concept drift is often priorly assumed or posteriorly detected
Meta-learning can help to automate this procedure by detecting concept drift and dynamically adapting learning tools
Concept drift detection
some papers…
Dynamic configuration adaptation
Once the concept drift is detected, configuration adaptation can be carried out
similar in promising configuration generation
6.2 Transfer learning
By using the knowledge from the source domain and learning task
- configuration generation(for the optimizer)
- configuration evaluation(for the evaluator)
Configuration Generation
reuse trained surrogate models or promising search strategies from past AutoML search(source) and improve the efficiency in current AutoML task(target)
surrogate model transfer
transfer the surrogate model, or its components such as kernel function
general case is hyper-parameter optimization machine
network cell transfer
Multi-task learning, is also employed to help configuration generation
Configuration Evaluation
transfer knowledge from previous configuration evaluations
widely employed in NAS approaches to accelerate the evaluation of candidate architectures
Model parameter transfer
initialize network with transferred feature layers, followed by fine-tuning
Function preserving transformation
first proposed in Net2Net, where new networks are initialized to represent the same functionality of a given trained model
also inspires new strategies to explore the network architecture space
7. Representative examples
7.1 Model selection using Auto-sklearn
CASH problem
aim to minimize the validation loss with respect to the model as well as its hyper-parameters and parameters
7.2 Reinforcement learning for NAS(NASNet)
RL
transfer learning
parameter sharing
greedy search
CNN with less depth and fewer parameters with comparable performance to that of state- of-art CNN designed by humans.
7.3 Feature Construction using ExploreKit
candidate feature generation
candidate feature ranking
meta learning employed to accelerate
with historical knowledge on feature engineering
candidate feature evaluation and selection
8. Summary
8.1 A brief history
8.2 Current status in the academy and industry
ICML NIPS KDD AAAI IJCAI JMLR
8.3 Future works
Problem setup
automatically creating features from the data
Techniques
Basic techniques
higher efficiency
simultaneously optimize configurations and parameters
Experienced techniques
meta learning
how to automate meta-learning..
transfer learning
automatically determine when and how to transfer what knowledge
Applications
- active learning
- neural network compression
- semi-supervised learning
Theory
Optimization theory
convergence speed
Learning theory
which type of problems can or cannot be addressed by an AutoML approach
Clarify AutoML approach generalization ability
AdaNet