强化学习
什么是强化学习
介于监督学习(有label)和无监督学习的中间
- 没有监督信息,只有“奖赏”的反馈信号
- 反馈通常是延迟的
- 样本通常不符合独立同分布假设
- 智能体的动作会影响到其后续观察到的数据的分布
Example:
- 直升机的飞行控制
- +r 沿着既定路线飞行
- -r 偏离或坠毁
- 组合投资管理
- +r 盈利
- -r 亏损
- 电站的控制
- +r 稳定输出电力
- -r 超出安全预警
- Atari游戏的控制
- +r 增加游戏分数
- -r 减小游戏分数
序列决策问题
奖赏 Reward
用于评价智能体在给定任务上动作的“奖励”:
- 通常是一个标量
- 在智能体决策的每一步,都会得到环境对其的奖赏
- 智能体的目标是最大化累积奖赏
问题可以用强化学习建模:
任务的目标可以等价的表示为在某个奖赏函数上的累积最大化
|
|
$\max\sum_{i=1}^{T}r_i$
目标:
- 通过选择动作最大化累计奖赏
- 奖赏可能得到延迟
- 有时需要牺牲眼前的小利益获得长远的大利益
状态 state
历史定义为,t时刻之前能观察到的所有信息:
$$ a_1, r_1,…o_t$$
状态是决定接下来会发生什么的关键信息
- 环境状态 $S_t^e$
- 环境的私有表示信息
- 决定了下一步环境反馈什么观察和奖赏给智能体
- 通常对智能体不是完全可见的
- 即使完全可见,对智能体来说含有大量的冗余信息
- 智能体状态$S_t^a$
- 智能体的内部表示
- 决定了下一步智能体选择什么动作
- 通常是强化学习算法的输入
- 其可以表示为历史的一个函数,即$S_t^a = f(H_t)$
马尔科夫决策过程
马尔科夫链:

一个状态是马尔可夫的,当且仅当
$$P(S_{t+1}|S_t) = P(S_{t+1}|S1, S2,…St)$$
给定现在,未来与历史无关
环境的状态$S_t^e, H_t$都是马尔可夫的
全部可观察性:
当$o_t=s_t^a=s_t^e$时,我们便得到了一个马尔科夫随机过程(MDP)
马尔科夫过程 MP
Definition: A Markov Process(or Markov Chain) is a tuple(S, P) 状态空间和概率转移矩阵
S is a (finite) set of states
P is a state transition probability matrix
$P_{ss’}=P{S_{t+1=s’}|S_t=s}$
马尔科夫奖赏过程 MRP
A Markov Reward Process is a tuple $(S, P, R, r)$
S is a finite set of states
P is a state transition probability matrix
$P_{ss’}=P{S_{t+1=s’}|S_t=s}$
R is a reward function
$R_s = E{R_{t+1}|S_t=s}$
r is a discount factor, $r \in [0,1]$
马尔科夫决策过程 MDP


A Markov Decision Process is a tuple $(S, A,P, R, r)$
S is a finite set of states
A is a finite set of actions
P is a state transition probability matrix
$P_{ss’}^a=P{S_{t+1=s’}|S_t=s, A_t=a}$
R is a reward function
$R_s^a = E{R_{t+1}|S_t=s, A_t=a}$
r is a discount factor, $r \in [0,1]$
Example
马尔科夫随机过程 MDP
$V(sunny) = E[\sum_{t=1}^Tr_t|S_0=sunny]$
$V(sunny) = E[\sum_{t=1}^\infty \gamma^tr_t|S_0=sunny]$
状态值函数
马尔科夫决策过程
策略(policy)的引入:状态到动作的映射
随机策略 $\pi(a|s)=P(a|s)$
确定性策略 $\pi(s)=argmax_aP(a|s)$
MDP的策略评估
状态值函数 V
从状态s开始,使用当前策略进行后续动作选择,得到的期望奖赏
$V^\pi(s)=E_\pi[\sum_{k=0}^\infty \gamma_k R_{t+k+1}|S_t=s]$
$V^\pi(s)=E_\pi[R_{t+1}+\gamma V^\pi(S_{t+1})|S_t=s]$ (递归表示)
状态-动作值函数 Q
从状态s开始,执行动作a,并使用当前策略进行后续选择
$Q^\pi(s,a)=E_\pi[{\sum_{k=0}^\infty \gamma^k R_{t+k+1}|s_t=s,a_t=a}]$
值函数转换关系 Bellman Expectation Equation
$V^\pi(s)=\sum_a\pi(a|s)Q^\pi(s,a)$
$Q^\pi(s,a)=R(s,a)+\gamma\sum_{s^{\prime}}P(s^{\prime}|s,a)V^\pi(s^{\prime})$
=>
$V^\pi(s)=\sum_a\pi(a|s)(R(s,a)+\gamma\sum_{s^{\prime}}P(s^{\prime}|s,a)V^\pi(s^{\prime}))$
$Q^\pi(s,a)=R(s,a)+\gamma\sum_{s^{\prime}}P(s^{\prime}|s,a)\sum_a\pi(a|s)Q^\pi(s^\prime,a^\prime)$
最优状态值函数
$$V^*(s)=\max_\pi V^\pi(s)$$
最优状态-动作函数
$$Q^*(s,a)=\max_\pi Q^\pi(s,a)$$$
- 最优函数值决定了MDP中可以达到的最优性能
- 当最优函数值已知时,该MDP已解
定义策略上的偏序关系
定理:对任意的MDP有
- 至少存在一个最优策略$\pi^$优于或不差于所有其他策略,即$\pi^ \ge \pi, \forall \pi$
- 所有的最优策略都可以取到最优状态值函数 $V^{\pi^}=V^(s)$
- 所有的最优策略都可以取到最优状态-动作值函数 $Q^{\pi^}(s,a) = Q^(s,a)$
最优策略
最优策略可以通过最大化Q函数得到,即
$\pi^(s)=argmax_aQ^{\pi^}(s,a)$
- 对于任意MDP,总是存在一个确定性的最优策略
- 如果最优Q函数已知,则最优策略已知
最优值函数
Bellman最优方程
$$V^(s)=max_aQ^(s,a)$$
$$Q^(s,a)=R(s,a)+\gamma\sum_{s^{\prime}}P(s^{\prime}|s,a)V^(s^{\prime})$$
=>
$V^\pi(s)=max_aR(s,a)+\gamma\sum_{s^{\prime}}P(s^{\prime}|s,a)V^*(s^{\prime})$
$Q^(s,a)=R(s,a)+\gamma\sum_{s^{\prime}}P(s^{\prime}|s,a)\max_a\pi(a|s)Q^(s^\prime,a^\prime)$
- 没有闭式解,没有一个式子可以直接解出来
- 可以迭代求解:值迭代,策略迭代,Q-learning,SARSA
强化学习算法
基于模型的方法
方法概述:
转移概率和奖赏函数未知,用函数逼近的方法拟合转移概率和奖赏函数,变成标准的MDP问题,然后使用DP planning方法求解
特点:
- 模型拟合通常是收敛的
- 并不保证拟合模型上的最优策略是真实的最优
代表算法:
- Dyna, GPS
研究较少,因为大部分问题难以建模,转移概率和奖赏函数非常复杂
基于值函数的方法
方法概述:
通过估计值函数来隐式得到策略
特点:
- 最好情况下可以最小化Bellman误差
- 非线性情况下通常不保证收敛
代表算法:
- Q-Learning, TD
基于策略梯度的方法
方法概述:
直接对目标进行梯度推导,通常是sample,执行梯度方法进行策略提升
特点:
- 避免值函数估计带来的策略退化(并不是loss回归误差越小,策略越好)
- 直接对目标进行优化
代表算法:
- Reinforce, TRPO
Actor-Critic类方法
结合值函数,策略梯度的方法
方法概述:
估计当前策略的值函数,并通过其来提升策略本身,通常是和策略梯度方法结合在一起
特点:
同时结合了值函数和策略梯度
代表算法:
A3C
样本复杂度
model-based shallow RL -> model-based deep RL -> off policy Q-function learning -> actor-critic style methods -> on policy gradient algorithms -> evolutionary or gradient-free algorithms
more efficient (fewer samples) -> less efficient (more samples)
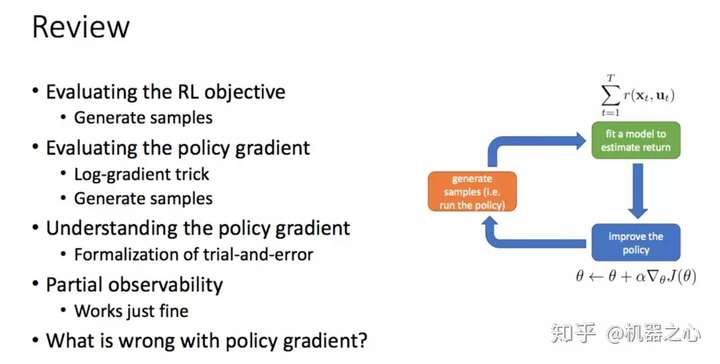
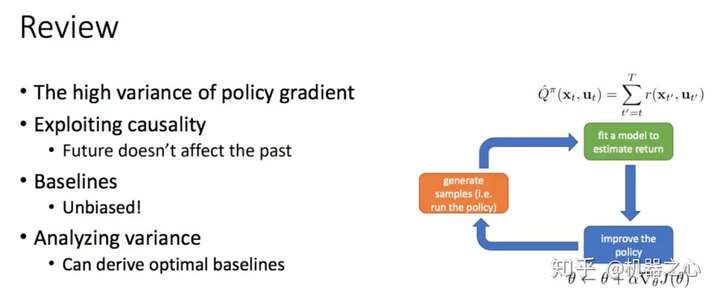
基于值函数估计的强化学习算法
过程

初始的Q值 -> 得到一个策略 -> 从环境中采样 -> Q值 ->…
fit $V(s)$ or $Q(s,a)$ -> set $\pi^(s)=argmax_aQ^{\pi^}(s,a)$
核心在估计值函数的计算/估计,第二步set较为简单
蒙特卡洛采样
Monte-Carlo Method:
$$Q^\pi(s,a)=\frac{1}{m}\sum_{i=1}^mR(\tau_i)$$
$\tau_i$ is sample by following $\tau$ after $s,a$, 采样的轨迹
多次采样,效率低,无法泛化
Monte-Carlo update:
$$Q(s_t,a_t)=Q(s_t,a_t)+\alpha(R-Q(s_t,a_t))$$
MC error: $\alpha(R-Q(s_t,a_t))$
增量更新,R从t+1开始,是轨迹上的,需要环境中run很多步,得到一个轨迹,到达终止状态或人为设置的步数,所以代价也很大
Temporal difference Method: TDerror
$$Q(s_t,a_t)=Q(s_t,a_t)+\alpha(r_{t+1}+\gamma Q(s_{t+1},a_{t+1})-Q(s_t,a_t))$$
TD error: $r_{t+1}+\gamma Q(s_{t+1},a_{t+1})-Q(s_t,a_t)$
$R$ – $r_{t+1}+\gamma Q(s_{t+1},a_{t+1})$
t+1之后的就不参加,用已有的Q估计代替,采样就只有一条
采样代价小,可泛化,参数化
Q-learning
$Q^\pi(s,a)$ based on $\pi$
$Q(s,a)$ $-\max_aQ(s,a)$
off-policy TD control
$Q_o=0$, initial state
for $i=0,1,..$
$s’,r$ = do action from policy $\pi_\epsilon$
$a’=\pi(s’)$
$Q^\pi(s,a)+=\alpha(r+\gamma Q^\pi(s’,a’)-Q(s,a))$
$\pi(s)=argmax_a Q(s,a)$
$s=s’, a=a’$
end for
目前在模型中学习到的policy
on-policy TD control
$Q_0=0$, initial state
for $i=0,1,…$
$s’, r$=do action from policy $\pi_\epsilon$
$a’=\pi_\epsilon(s’)$
$Q^\pi(s,a)+=\alpha(r+\gamma Q^\pi(s’,a’)-Q(s,a))$
$\pi(s)=argmax_a Q(s,a)$
$s=s’, a=a’$
end for
a是执行采样的policy得到的,$\pi_\epsilon$参数化的policy
- off policy:able to improve the policy without generating new samples from that policy
- on policy: each time the policy is changed, even a little bit, we need to generate new samples
如果空间连续,不能这样做
值函数估计
可以将Q用参数表示,w
Q-learning with function approximation
$w=0$, initial state
for $i=0,1,…$
$s’,r=$ do action from policy $\pi_\epsilon$
$a’=\pi(s’)$
$w+=$ $\theta(r+\gamma\hat Q(s,a)-\hat Q(s,a)) \nabla(s_t, a_t)$
$\pi(s)=argmax_a Q(s,a)$
$s=s’, a=a’$
end for
$J(w)=E_{s\sim\pi}[(Q^\pi(s,a)-\hat Q(s,a))^2]$
$\hat Q(s,a)$– when using DNN model, it will be Deep Q-learning(DQN)
基于策略梯度的强化学习算法
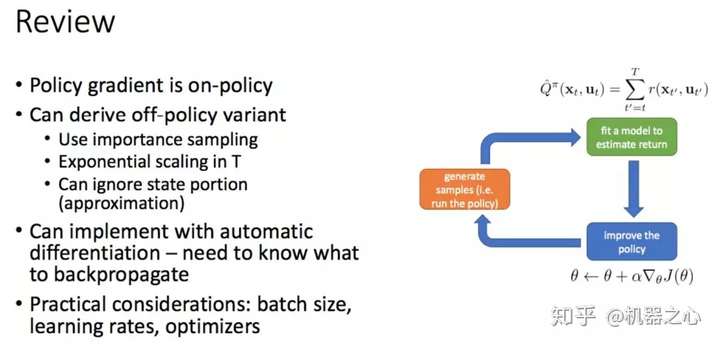
核心在梯度的计算
目标函数->梯度->优化
$$J(\theta)=\int_\tau {p_\theta(\tau)R(\tau)} \,{\rm d}\tau$$
$\theta$ , policy的参数,$J$ 是策略在所有轨迹$\tau$的概率的期望
$$P_\theta(\tau)=p(s_0)\prod_{i=0}^{T-1}p(s_{i+1}|a_i,s_i)\pi_\theta(a_i|s_i)$$
$\nabla_\theta J=\int_\tau {p_\theta(\tau)\nabla_\theta p_\theta(\tau) \log R(\tau)} \,{\rm d}\tau$
trick: $\nabla_\theta p_\theta(\tau) =p_\theta(\tau)\nabla_\theta\log p_\theta(\tau) $
$p\nabla_\theta\log p_\theta(\tau)=$ …
REINFORCE 算法
…
另一种表达(在稳定分布上积分)
…
A3C
DDPG
TRPO
PPO